OpenAI’s Robotic Hand Can Now Solve a Rubik’s Cube One-Handed
News Publisher Oct 15, 2019 16:00
OpenAI, the San Francisco-based artificial intelligence research organization, has hit a new milestone this week.

This article is contributed by our content partner, Nexchange NOW.
OpenAI, the San Francisco-based artificial intelligence research organization, has hit a new milestone this week.
Since May 2017, we’ve been trying to train a human-like robotic hand to solve the Rubik’s Cube. We set this goal because we believe that successfully training such a robotic hand to do complex manipulation tasks lays the foundation for general-purpose robots. We solved the Rubik’s Cube in simulation in July 2017. But as of July 2018, we could only manipulate a block on the robot. Now, we’ve reached our initial goal.
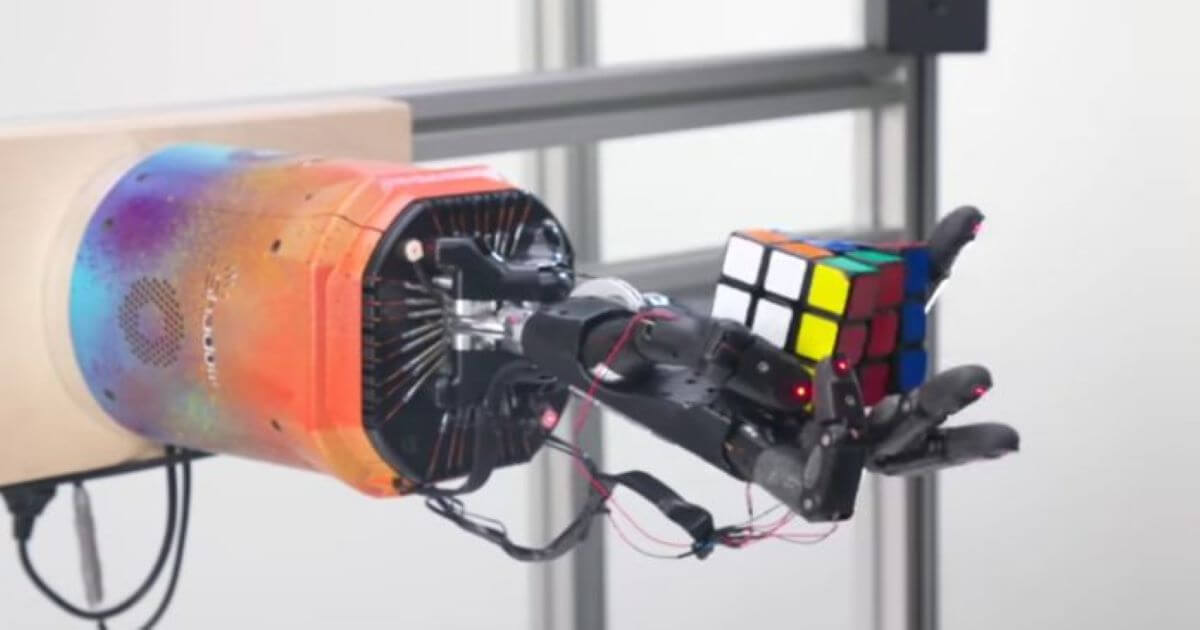
That’s right. OpenAI’s robotics division has announced that Dactyl, it’s AI-fueled, surprisingly dexterous robotic hand, has finally solved a Rubik’s all on its own.
And it didn’t just solve it, no. Dactyl managed to solve the cube with two of its fingers tied, wearing a rubber glove, and being hit by a stuffed giraffe. OpenAI themselves were quite surprised by the result:
We find that our system trained with ADR (Automatic Domain Randomization) is surprisingly robust to perturbations even though we never trained with them: The robot can successfully perform most flips and face rotations under all tested perturbations, though not at peak performance.
Before anyone starts screaming that this is the dawn of Skynet, however, OpenAI said that Dactyl only managed to solve the cube 60% of the time and “only 20% of the time for a maximally difficult scramble.”
Image via Nexchange NOW
Original Article: http://www.nexchangenow.com/news/ai/71138/openais-robotic-hand-can-now-solve-a-rubiks-cube-one-handed/
Image source: Shutterstock
.jpg)